
선별 비용 감소
작업 시간 증가
선별 속도 증가
얇은투명페트, 일반투명페트, 녹색페트, 갈색페트, 하얀페트, 혼색페트,알루미늄캔, 투명유리병, 갈색유리병, 녹색유리병, 파랑유리병, 혼색유리병 등 → 용도·색상에 따라 선별, 추가 개발 가능
AI
역할: 딥러닝 기반 재질 분석 인식 및 학습, 제어 알고리즘 개발 기술
인식과정의 정보로 판단 후 행동영역에 명령을 내리는 인공지능으로 비전센서를 통한 객체 인식과 객체의 추정경로를 따라 로봇팔을 움직여 최종적으로 원하는 목적지로 객체의 이동명령.
로봇을 제어하는 인공지능 판단 기능(객체 모양, 재활용 가능 대상 판단, 재질 등의 인식·판단)
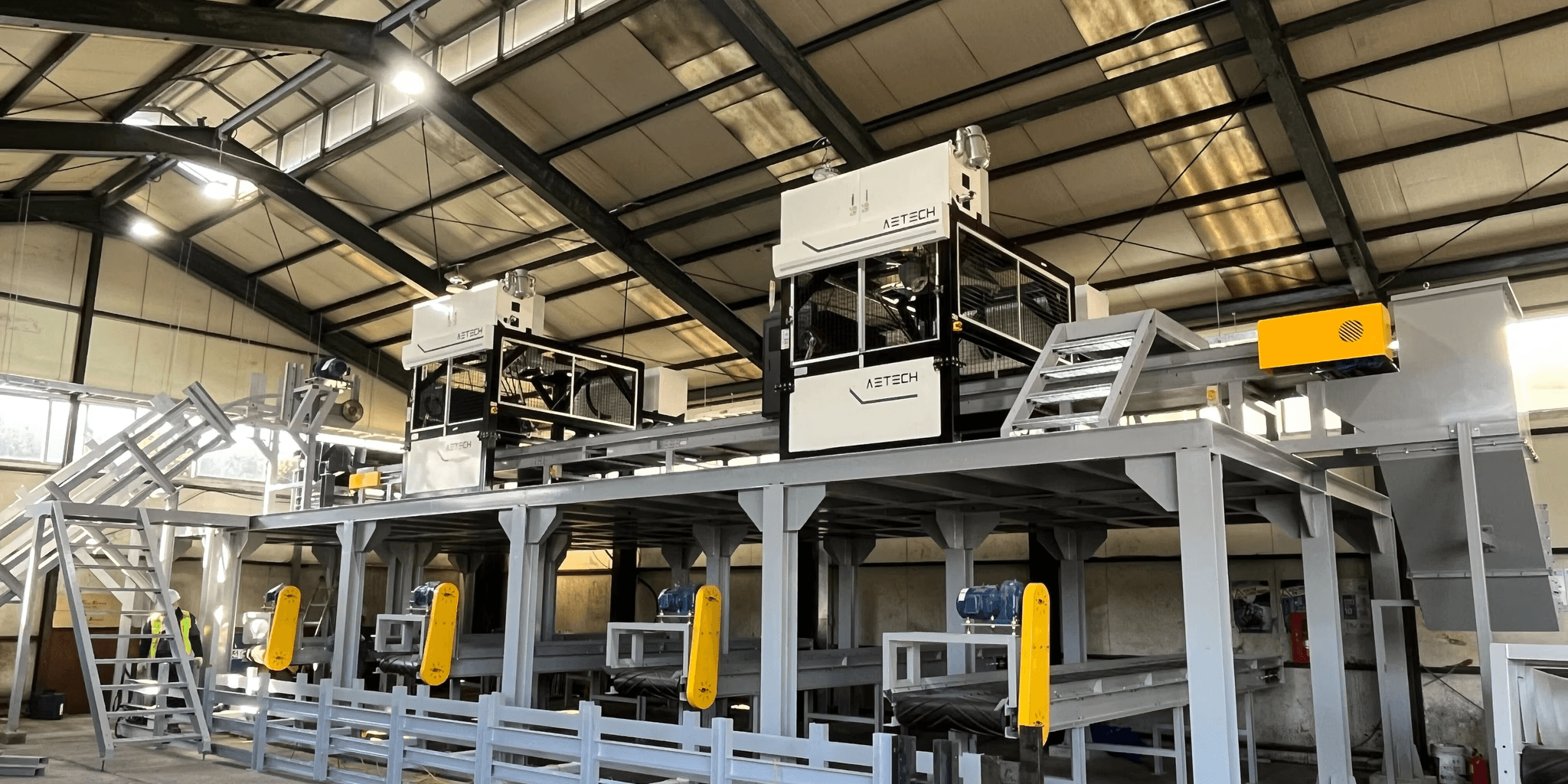
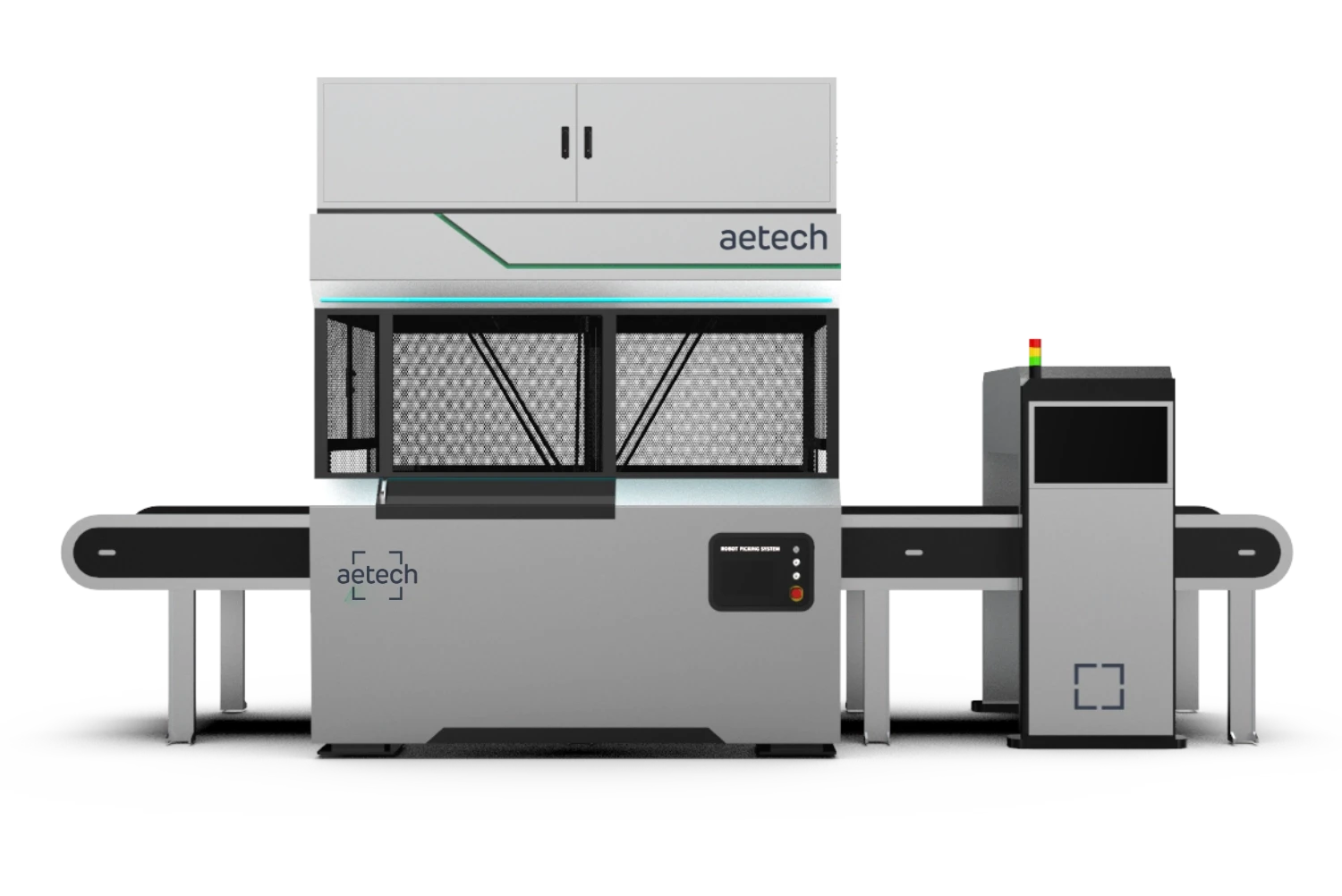
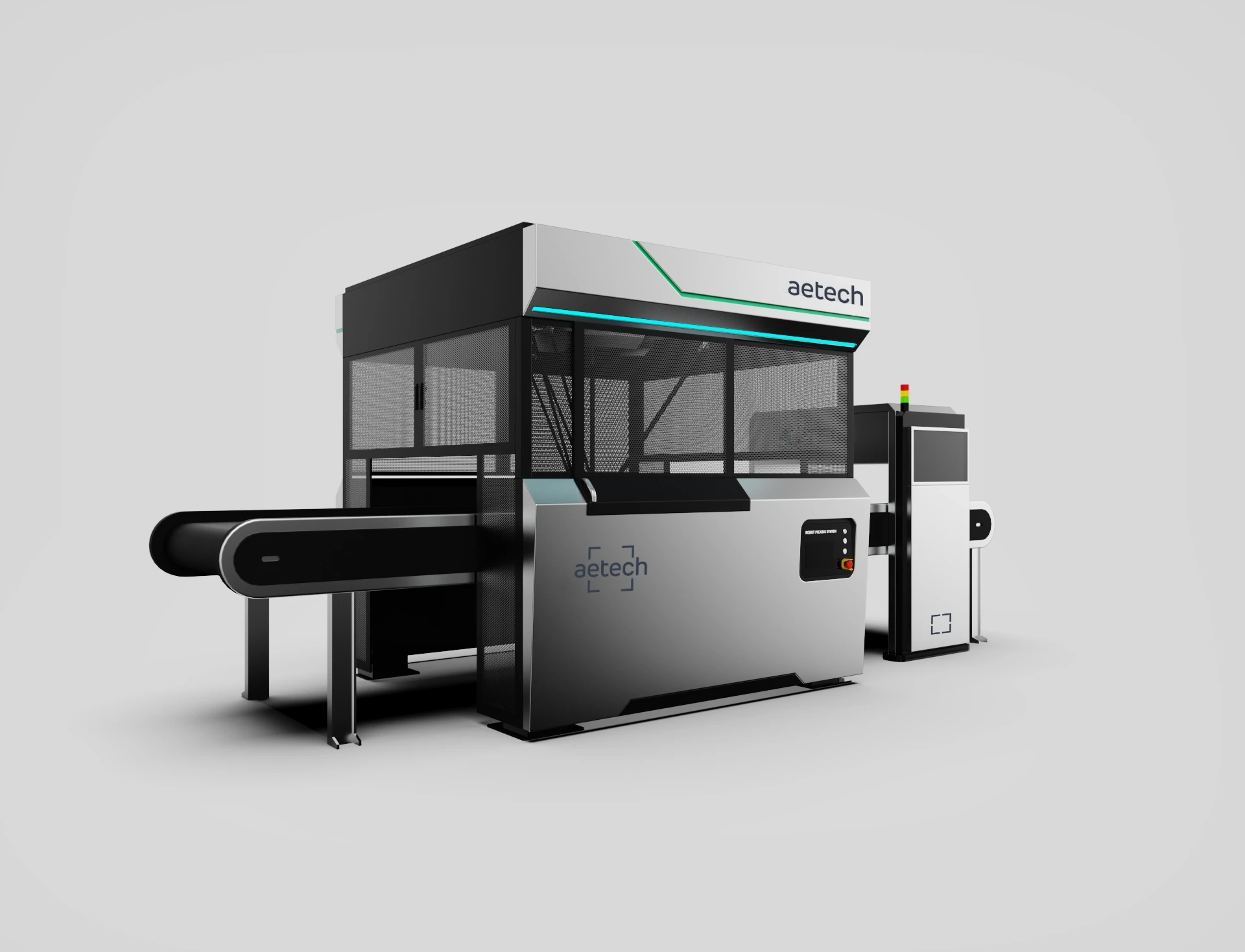
HW 설계
역할: 고객 상황에 맞는 설비 커스터마이징, 폐기물 선별 최적화 HW 설계 및 제작
Vision 광학계 및 Robot을 설치 할 수 있는 프레임 설계 및 제작.
폐기물 Pick&Place 성공률 최적화 Robot End Effector 개발.
고속 공기 방향 전환 장치 개발. 설비 설치를 위한 부대 시설 공사 및 전기 공사 진행.
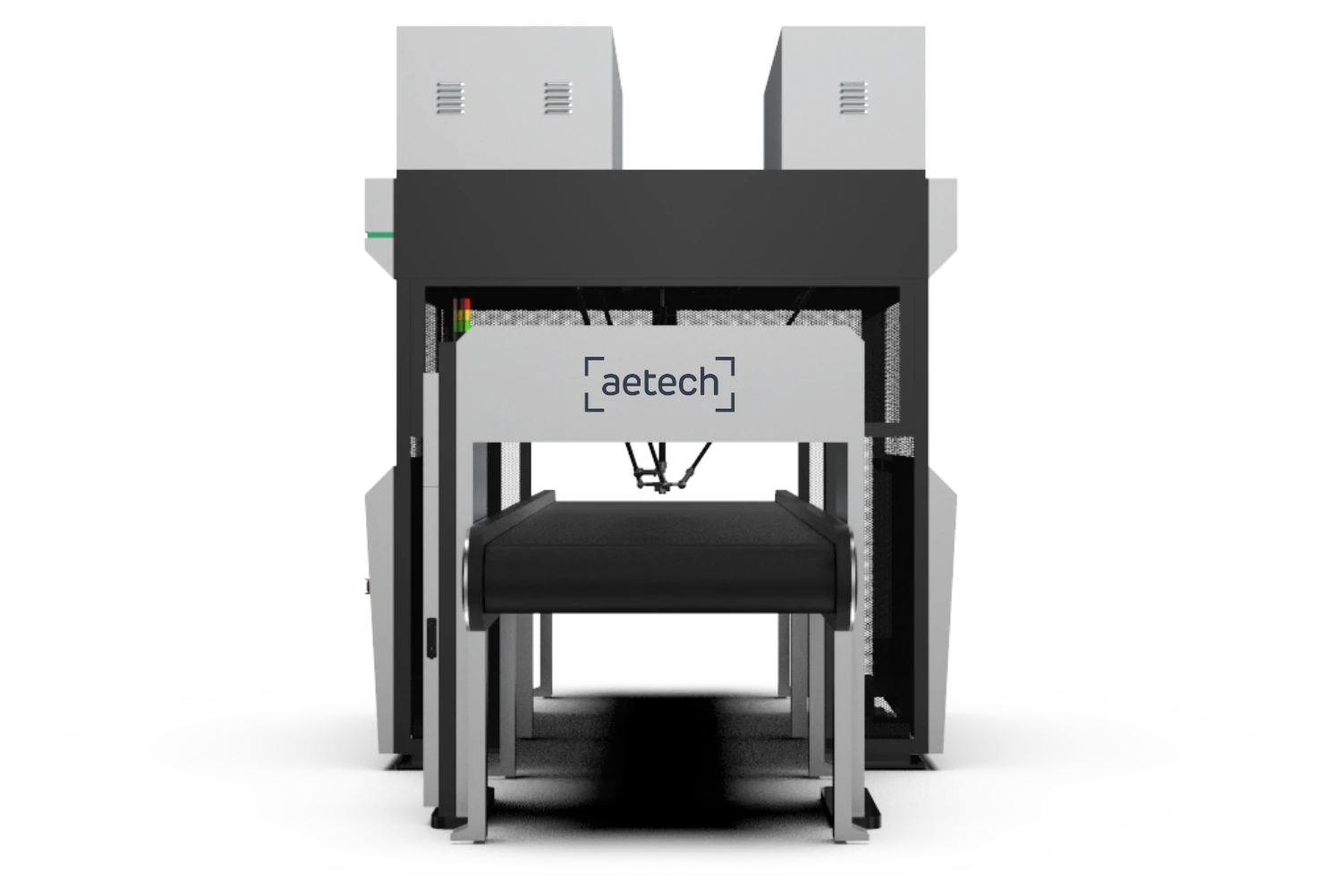
로봇 제어
역할: 3축의 매니퓰레이터
판단영역의 명령을 수행하는 로봇암으로 식별된 재활용 폐기물을 적정 압력으로 픽킹하여 최종적으로 목적지에 분류하는 역할 수행.
1분 당 최대 96개의 객체를 분류하며 사람의 2배 속도로 장시간 운전 가능
기록
역할: 입고량, 재활용품별 분류량, 최종 폐기량 등의 데이터 수집·통계
실시간 분류 모니터링 → 하루 처리량, 로보틱스의 상태관리, 소모품, 교제주기 등 확인 가능
온라인 원격서비스 -> 현장 문제 빠르게 해소
일간, 월간 등의 전력 소비량 파악 → 고객사의 효율적인 사업장 관리 방안 제시